Quick Example
What this tool does, in 30 seconds. Given a bearing designation and a radial load, the pipeline computes the maximum subsurface shear stress and tells you how close you are to the material limit.
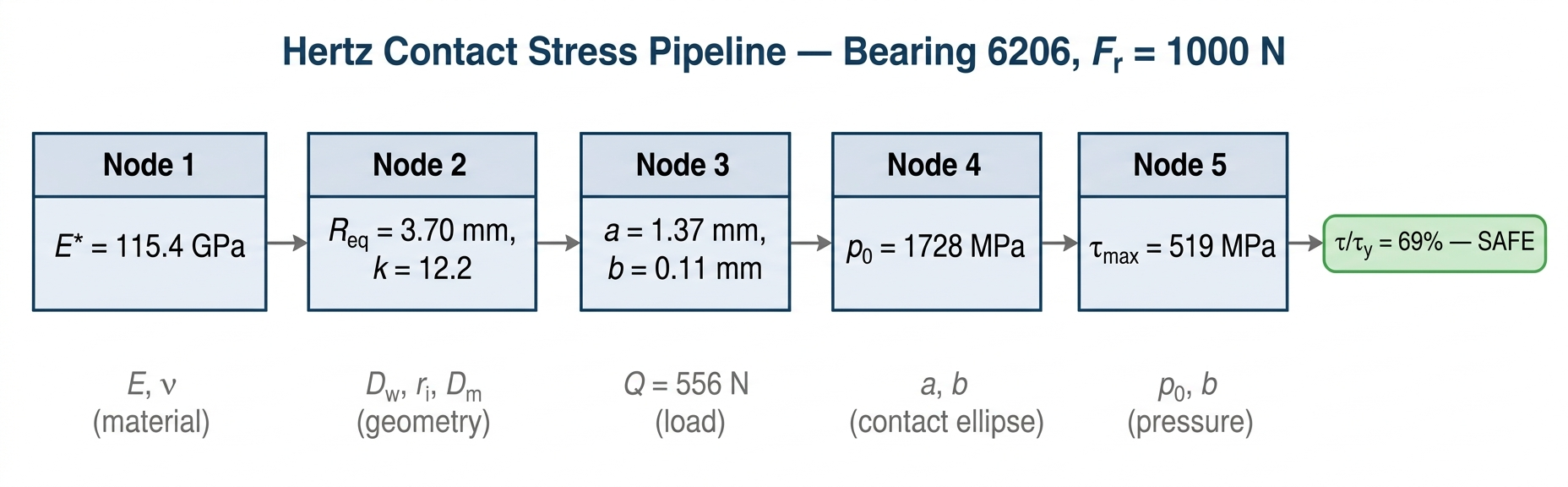
Input: Bearing 6206, radial load 1000 N, AISI 52100 steel ( \(E = 210\) GPa, \(\nu = 0.3\) ). Ball Ø 9.525 mm, inner groove radius 4.89 mm, pitch diameter 46.0 mm, 9 balls, \(\alpha = 0°\) .
The maximum subsurface shear stress is 69 % of the shear yield strength of hardened AISI 52100 ( \(\tau_y \approx 750\) MPa, Tresca). Margin to yield: 31 %. Infinite fatigue life expected at this load level.
| Check | Value | Limit | Status |
|---|---|---|---|
| \(\tau_{\max} / \tau_y\) | 69 % | 100 % | Safe — 31 % margin |
| \(\tau_{\max} / \tau_{fatigue}\) | 76 % | 100 % | Below fatigue limit |
| \(F_r / C_0\) | 8.9 % | 100 % | Light load |
| Node | Quantity | Value | Unit |
|---|---|---|---|
| 1 | Reduced elastic modulus \(E^*\) | 115.4 | GPa |
| 2 | Equivalent radius \(R_{eq}\) | 3.700 | mm |
| 2b | Ellipticity \(k = a/b\) | 12.19 | — |
| 3 | Contact semi-axes \(a \times b\) | 1.368 × 0.112 | mm |
| 4 | Max contact pressure \(p_0\) | 1728 | MPa |
| 5 | Max shear stress \(\tau_{\max}\) | 519 | MPa |
| 5 | Critical depth \(z_{cr}\) | 88 | μm |
📓 Open in Google Colab to run the calculation with your own bearing data.
Pipeline Overview
The pipeline takes bearing geometry, material properties, and radial load as input. It outputs the maximum subsurface shear stress \(\tau_{\max}\) and its depth \(z_{cr}\) , which govern fatigue initiation at the ball–raceway contact.
The pipeline is linear and non-iterative. The only potentially iterative step (elliptic integrals in Node 2b) is handled by the Hamrock-Brewe closed-form approximation.
Node 1 — Reduced Elastic Modulus \(E^*\)
Purpose: combine the elastic properties of ball and raceway into a single equivalent modulus.
| Symbol | Description | Unit |
|---|---|---|
| \(E_1\) | Young’s modulus, ball | Pa |
| \(\nu_1\) | Poisson’s ratio, ball | — |
| \(E_2\) | Young’s modulus, raceway | Pa |
| \(\nu_2\) | Poisson’s ratio, raceway | — |
Harris convention (used in Nodes 3–4):
| Output | Description | Unit |
|---|---|---|
| \(E^*\) | Reduced elastic modulus | Pa |
| \(E'\) | Harris reduced modulus | Pa |
Node 2 — Curvatures and Equivalent Radius
Purpose: compute the four principal curvatures at the ball–inner-race contact and combine them into an equivalent radius \(R_{eq}\) and an ellipticity parameter.
| Input | Description | Unit |
|---|---|---|
| \(D_w\) | Ball diameter | m |
| \(r_i\) | Inner race groove radius | m |
| \(D_m\) | Pitch (mean) diameter | m |
| \(\alpha\) | Contact angle | rad |
The two principal planes at the contact point are:
- Plane I (rolling direction): circumferential plane through ball centre.
- Plane II (transverse direction): axial cross-section through ball centre.
Ball (sphere):
Inner raceway:
The negative sign indicates that the groove is concave — it wraps around the ball.
Curvature sums:
Ellipticity (Hamrock-Brewe 1983)
The ratio \(R_y/R_x\) determines the shape of the contact ellipse. The Hamrock-Brewe closed-form approximation replaces iterative evaluation of complete elliptic integrals:
where \(k = a/b\) is the ellipticity ratio, \(\mathcal{E}\) the complete elliptic integral of the second kind, \(\mathcal{F}\) the first kind. Accurate to < 1 % for \(R_y/R_x > 1\) .
Why Hamrock-Brewe? Exact evaluation requires iterative root-finding (the argument depends on \(k\) , which depends on the integrals). The Hamrock-Brewe formulas break this circularity, keeping the pipeline non-iterative and scipy-free.
| Output | Description | Unit |
|---|---|---|
| \(R_{eq}\) | Equivalent radius | m |
| \(k\) | Ellipticity ratio \(a/b\) | — |
| \(\mathcal{E}\) | Elliptic integral, 2nd kind | — |
| \(\mathcal{F}\) | Elliptic integral, 1st kind | — |
Node 3 — Contact Ellipse Semi-Axes
Purpose: compute the dimensions of the elliptical contact patch.
The load on the most-loaded ball follows the Stribeck equation (zero clearance):
Contact semi-axes (Hamrock-Dowson):
where \(a\) is the major semi-axis (transverse) and \(b\) the minor (rolling direction).
| Output | Description | Unit |
|---|---|---|
| \(Q_{\max}\) | Load on most-loaded ball | N |
| \(a\) | Major semi-axis | m |
| \(b\) | Minor semi-axis | m |
Node 4 — Maximum Contact Pressure
Purpose: peak Hertzian pressure at the centre of the contact ellipse.
| Output | Description | Unit |
|---|---|---|
| \(p_0\) | Maximum contact pressure | Pa |
Node 5 — Maximum Shear Stress and Critical Depth
Purpose: maximum subsurface shear stress (Tresca) and the depth where fatigue cracks initiate.
For \(k \gg 1\) (highly elliptical, typical of ball bearings), the stress field approximates 2D plane-strain Hertz contact in the \(b\) -direction (< 1 % error for \(k > 5\) ).
Subsurface stresses along the \(z\) -axis:
Analytical maximum:
| Output | Description | Unit |
|---|---|---|
| \(\tau_{\max}\) | Maximum subsurface shear stress | Pa |
| \(z_{cr}\) | Critical depth below surface | m |
Numerical Verification — Bearing 6206
Input Data
| Parameter | Symbol | Value | Unit | Source |
|---|---|---|---|---|
| Bore diameter | \(d\) | 30 | mm | Catalog |
| Outer diameter | \(D\) | 62 | mm | Catalog |
| Ball diameter | \(D_w\) | 9.525 | mm | Catalog |
| Number of balls | \(Z\) | 9 | — | Catalog |
| Inner groove radius | \(r_i\) | 4.89 | mm | Catalog ( \(f_i = 0.513\) ) |
| Pitch diameter | \(D_m\) | 46.0 | mm | \((d+D)/2\) |
| Contact angle | \(\alpha\) | 0 | ° | Deep groove, radial |
| Young’s modulus | \(E\) | 210 | GPa | AISI 52100 |
| Poisson’s ratio | \(\nu\) | 0.3 | — | AISI 52100 |
| Radial load | \(F_r\) | 1000 | N | Test condition |
| Static load rating | \(C_0\) | 11.2 | kN | SKF catalog |
Node-by-Node Computation
Node 1:
Node 2: Ball radius \(r_{ball} = 4.7625\) mm. Curvatures: \(\rho_{1x} = \rho_{1y} = 209.97\) m \(^{-1}\) .
Inner race: \(R_{2x} = (46.0 - 9.525)/2 = 18.238\) mm → \(\rho_{2x} = 54.83\) m \(^{-1}\) . \(\rho_{2y} = -1/4.89 = -204.50\) m \(^{-1}\) (concave groove).
\(1/R_x = 264.81\) m \(^{-1}\) → \(R_x = 3.776\) mm. \(1/R_y = 5.475\) m \(^{-1}\) → \(R_y = 182.7\) mm. \(\Sigma\rho = 270.3\) m \(^{-1}\) , \(R_{eq} = 3.700\) mm, \(R_y/R_x = 48.37\) .
Hamrock-Brewe: \(k = 12.19\) , \(\mathcal{E} = 1.013\) , \(\mathcal{F} = 3.864\) .
Node 3: \(Q_{\max} = 5 \times 1000 / 9 = 555.6\) N.
\(a = 12.19 \times 0.1122 = 1.368\) mm. Contact area: \(A = 0.482\) mm².
Node 4:
Cross-check: sphere-on-flat gives \(p_0 = 3981\) MPa — groove conformity reduces pressure by 2.3×.
Node 5: \(\tau_{\max} = 0.300 \times 1728 = 518.5\) MPa at \(z_{cr} = 0.786 \times 0.112 = 88\) μm. Numerical scan confirms \(\tau_{\max} = 518.9\) MPa at \(\zeta = 0.786\) (deviation < 0.1 %).
Verification Summary
| Quantity | Computed | Unit | Check |
|---|---|---|---|
| \(E^*\) | 115.4 | GPa | Matches \(E/(2(1-\nu^2))\) for same-steel contact |
| \(R_{eq}\) | 3.700 | mm | \(R_x \ll R_y\) confirms high ellipticity |
| \(k\) | 12.19 | — | Typical range 8–15 for DGBB |
| \(a\) | 1.368 | mm | Contact patch ≈ grain of rice |
| \(b\) | 0.112 | mm | \(a/b = k\) ✓ |
| \(p_0\) | 1728 | MPa | Well below 4600 MPa ( \(C_0\) limit) at 9 % \(C_0\) |
| \(\tau_{\max}\) | 519 | MPa | 69 % of \(\tau_y\) — safe, consistent with light load |
| \(z_{cr}\) | 88 | μm | ≈ \(0.8 b\) , matches 2D Hertz theory |
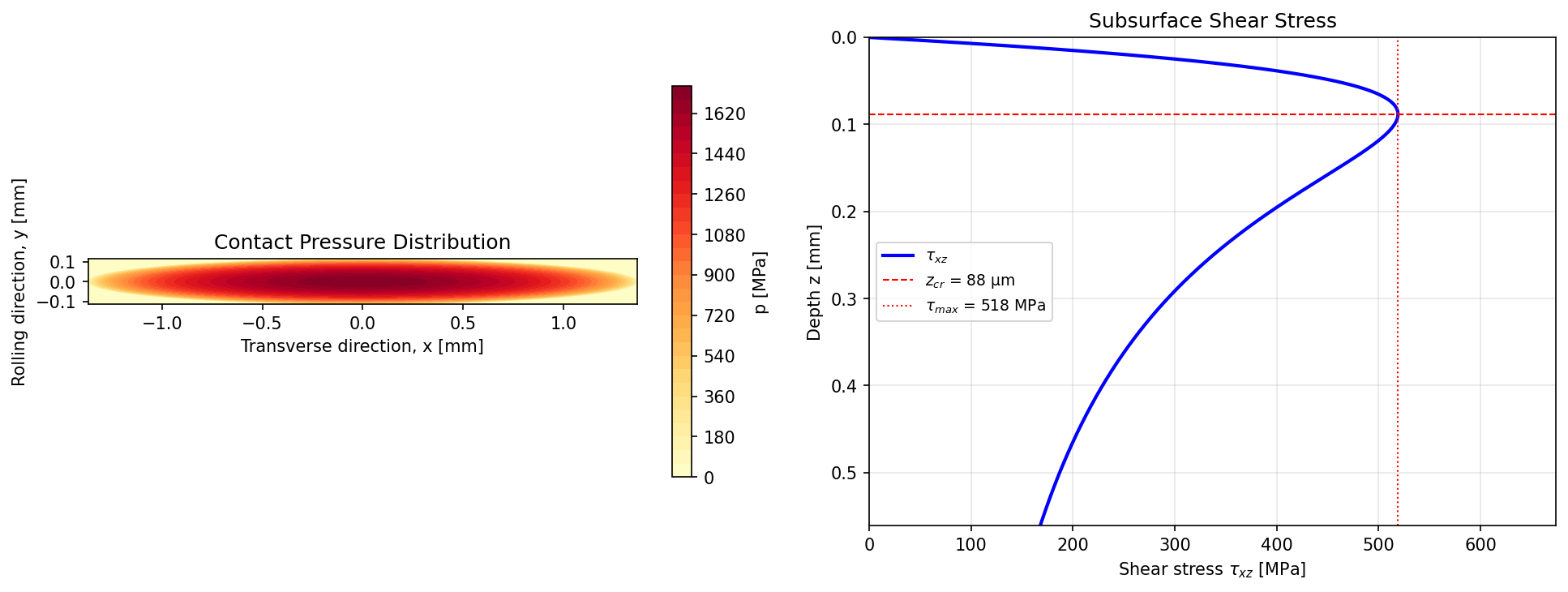
Graphical Results
Figure 1 — Left: Hertzian pressure distribution on the contact ellipse (1728 MPa peak, ellipse ≈ 2.7 × 0.22 mm). Right: subsurface shear stress profile showing the maximum at \(z_{cr} = 88\) μm.

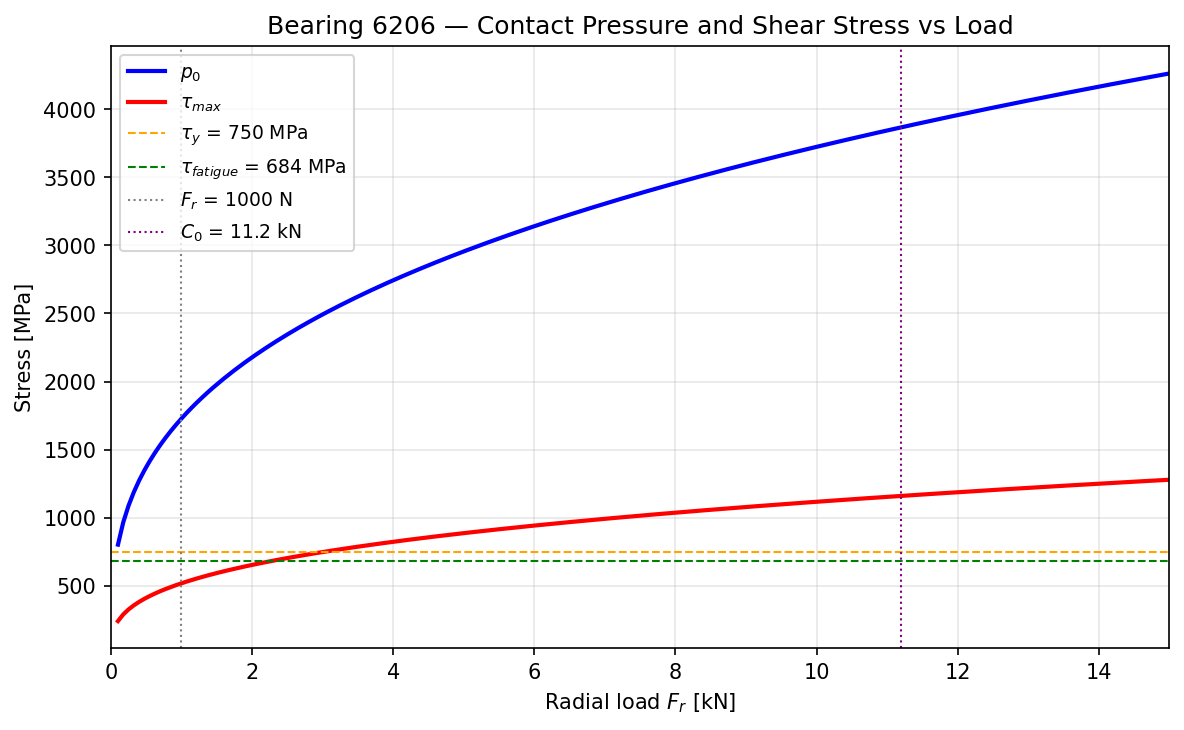
Figure 2 — Maximum contact pressure \(p_0\) and subsurface shear stress \(\tau_{\max}\) vs radial load. Horizontal lines: shear yield and fatigue limits. Vertical lines: current load (1000 N) and static rating ( \(C_0 = 11.2\) kN).
How to Use the Notebook
Requirements
Only numpy and matplotlib — both pre-installed in Google Colab.
Running
- Open hertz_contact_stress_pipeline.ipynb directly in Colab.
- Edit the Input Parameters cell with your bearing data.
- Run all cells (Runtime → Run all).
Adapting to Other Bearings
- Look up \(D_w\) , \(Z\) , \(d\) , \(D\) from manufacturer catalog.
- Compute \(r_i = f_i \times D_w\) (typical \(f_i = 0.515\) –\(0.52\) ; use 0.52 if unknown).
- Update
E1,E2,nu1,nu2if material differs from steel. - Set
alpha > 0for angular contact bearings.
Limitations
- Inner race contact only. Outer race (less critical for DGBB) not computed.
- Zero clearance assumed. Stribeck factor assumes no radial clearance or preload.
- Plane-strain approximation for \(\tau_{\max}\) . Valid for \(k > 5\) .
- Static/quasi-static only. No centrifugal or gyroscopic effects.
References
- Anoopnath, P. R., Suresh Babu, V., & Vishwanath, A. K. (2018). Hertz Contact Stress of Deep Groove Ball Bearing. Materials Today: Proceedings, 5(1), 3283–3288.
- Hamrock, B. J. & Brewe, D. E. (1983). Simplified equation for elliptical-contact deformation between two elastic solids. ASME J. Lub. Tech., 105(2), 171–177.
- Harris, T. A. & Kotzalas, M. N. (2006). Rolling Bearing Analysis, 5th ed. CRC Press.
- Johnson, K. L. (1985). Contact Mechanics. Cambridge University Press, §4.2.
- Budynas, R. G. & Nisbett, J. K. (2020). Shigley’s Mechanical Engineering Design, 11th ed. McGraw-Hill, §3.19.
- SKF Group. Product data: 6206 Deep Groove Ball Bearing.