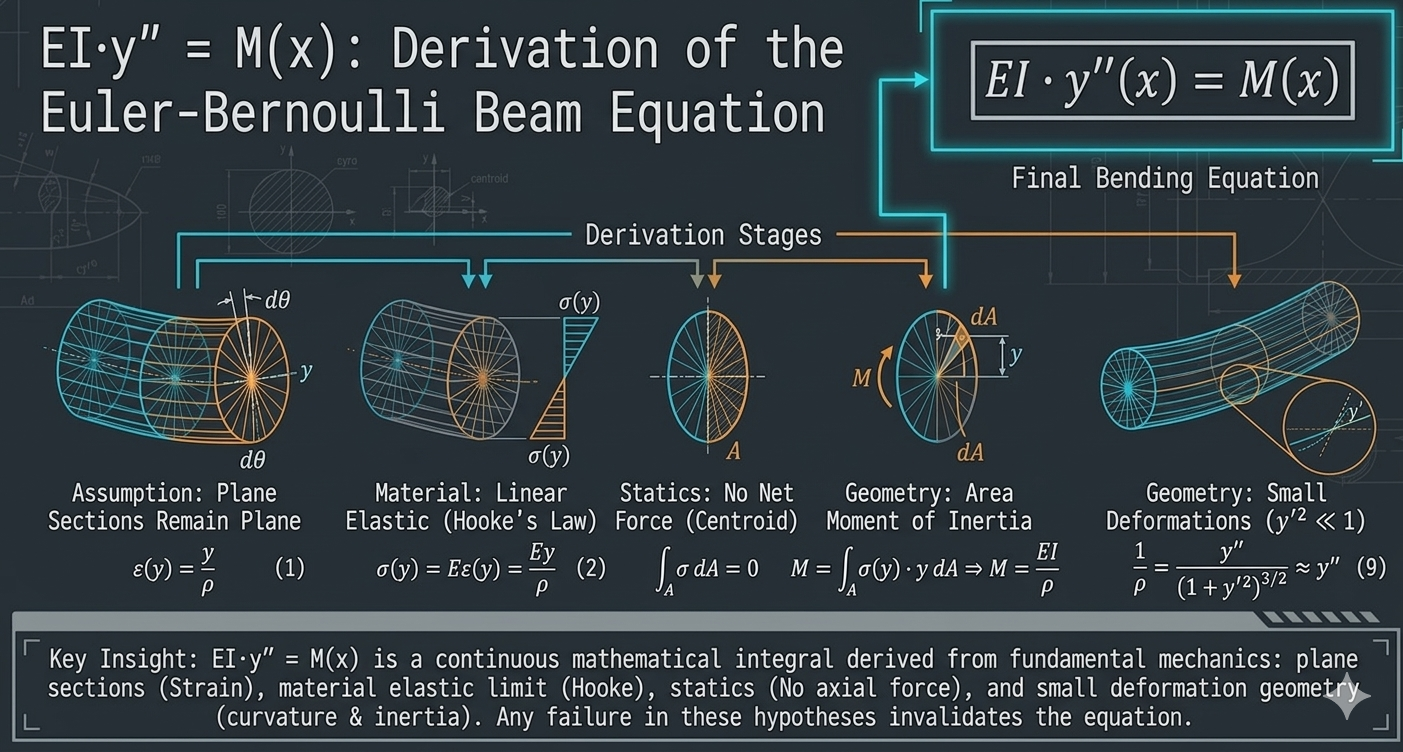
Derivation of EI · y″ = M(x)
A straight beam is subjected to bending. We want a relation between the bending moment at a cross-section and the curvature of the beam axis.
\(y\) is the vertical axis of the cross-section, origin on the neutral axis. \(\rho\) is the radius of curvature of the deformed axis. \(x\) runs along the beam.
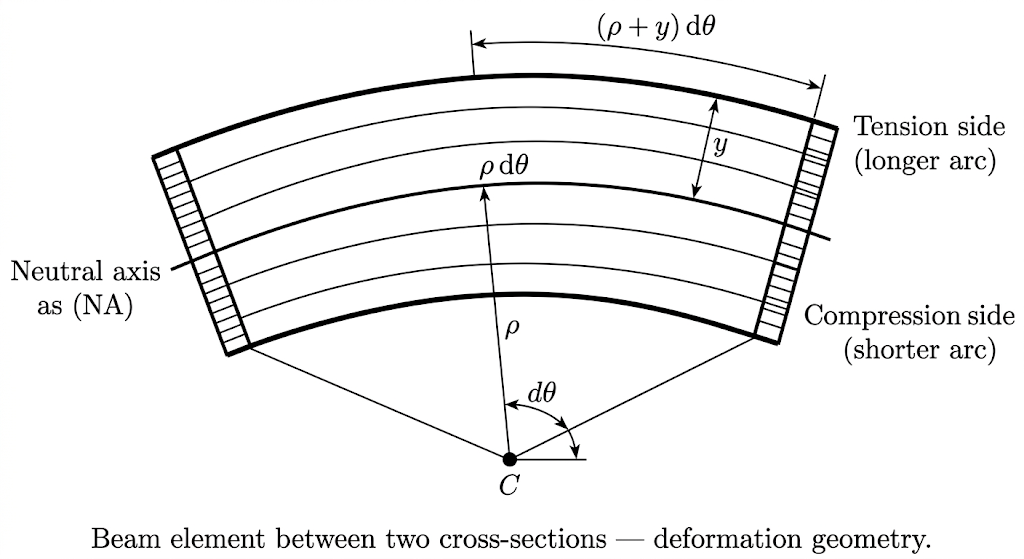
If cross-sections remain plane after deformation, a section rotating by \(d\theta\) produces between two adjacent sections a relative displacement \(y \, d\theta\) over an arc \(\rho \, d\theta\) :
Breaks down for beams with depth-to-span ratio above roughly 1/5, where shear deformation is no longer negligible.
Hooke’s law (\(\sigma = E\varepsilon\) ) applied to (1):
Requires homogeneous material with no fibre beyond the elastic limit.
No net axial force acts on the section. Integrating (2) over the area:
\(E/\rho \neq 0\) , so \(\int_A y \, dA = 0\) : the neutral axis passes through the centroid of the section. This anchors the origin of \(y\) .
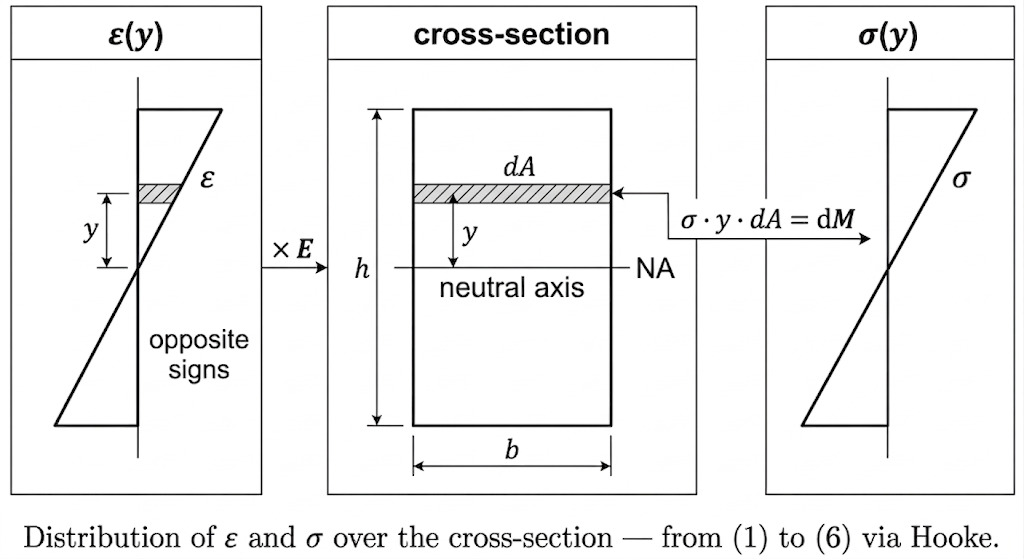
Each strip \(dA\) at distance \(y\) from the neutral axis carries a force \(\sigma \, dA\) with lever arm \(y\) :
Integrating (4) over the section and substituting (2):
\(E\) and \(\rho\) do not depend on position over the section and come out of the integral. \(\int_A y^2 \, dA = I\) , a purely geometric property of the section. For a rectangle \(b \times h\) :
The cube of \(h\) comes from integrating \(y^2\) over a domain of width \(h\) .
(5) with \(I\) :
The exact curvature of a plane curve \(y(x)\) (full derivation):
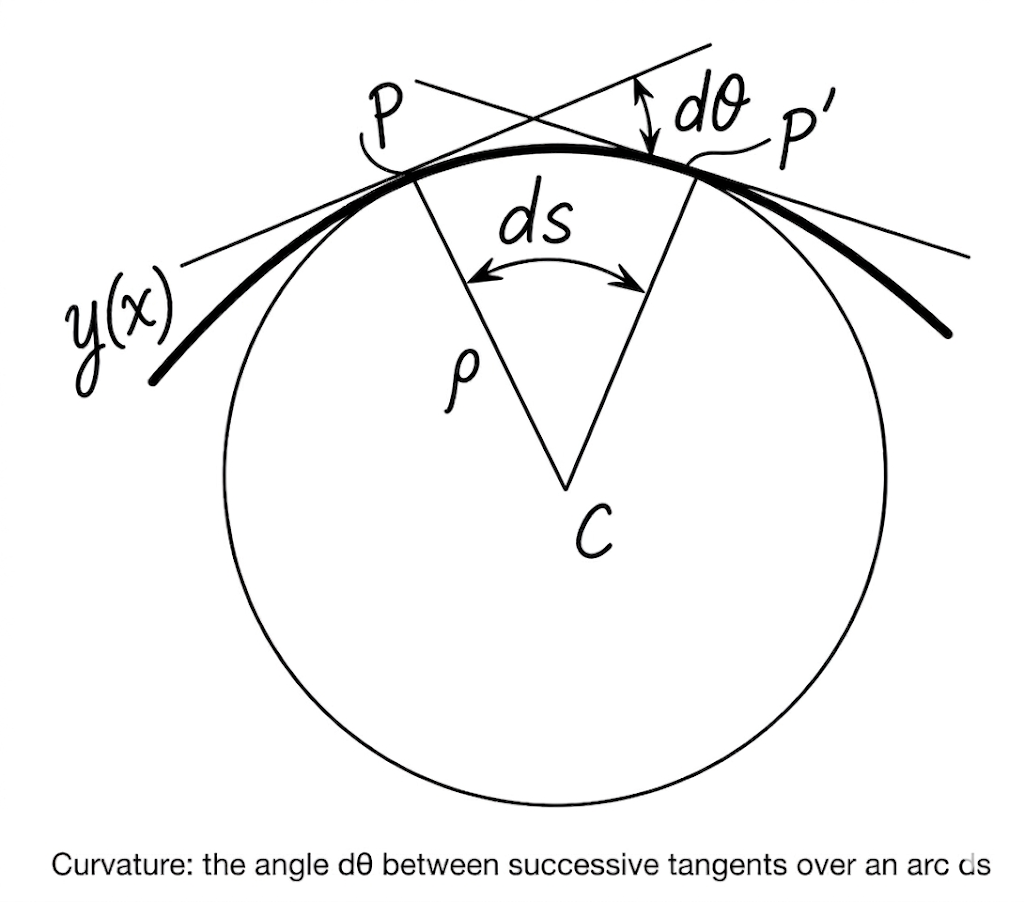
Where it comes from: the tangent angle is \(\theta = \arctan(y')\) , giving \(d\theta/dx = y''/(1+y'^2)\) . The arc length element is \(ds = \sqrt{1+y'^2}\,dx\) . Curvature is \(d\theta/ds = (d\theta/dx)/(ds/dx)\) , which yields (8).
For small deformations \(y'^2 \ll 1\) , the denominator tends to 1:
Approximation within 1% for slopes below 6° (\(y' < 0.1\) ).
(9) into (7):
Assumptions, in the order they entered: plane sections (1), linear elastic material (2), no net axial force (3), section geometry known (6), small deformations (9). If any one fails, (10) does not hold.