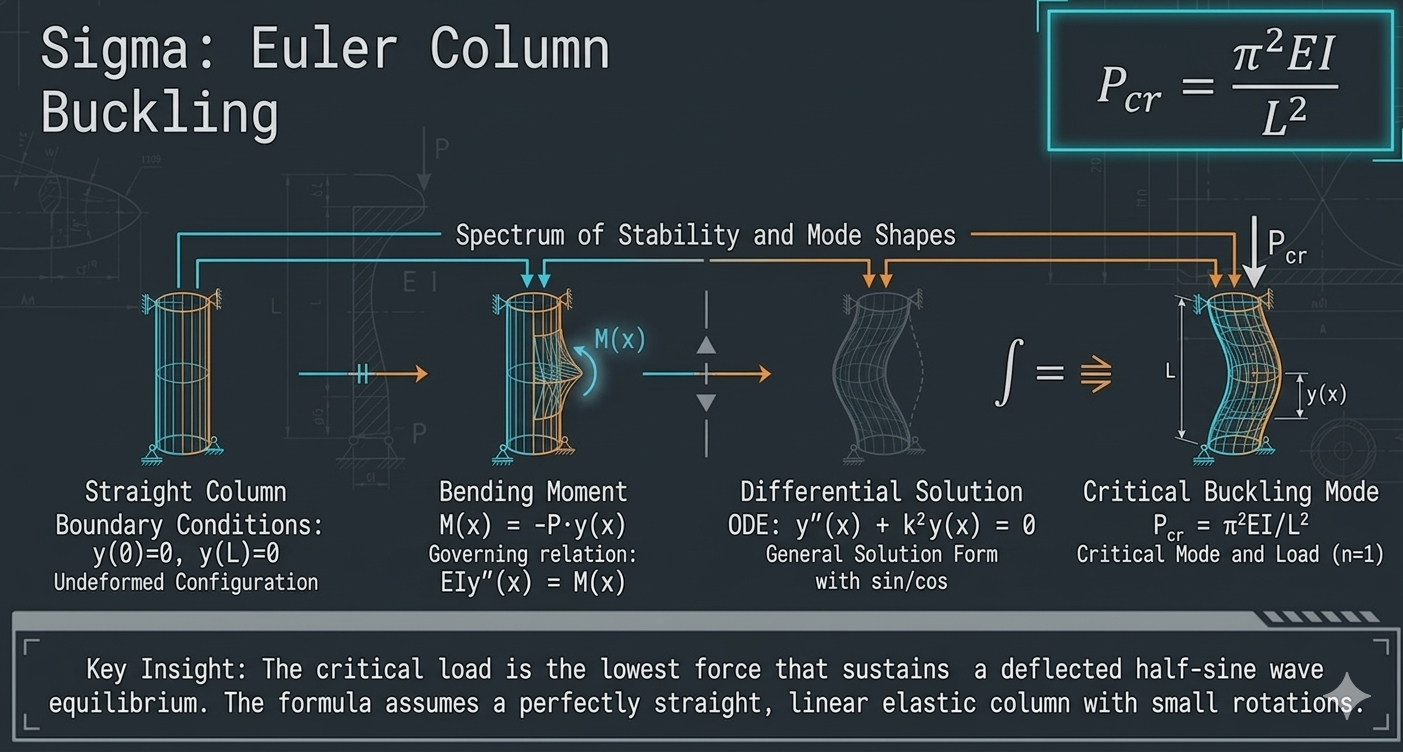
Where \(P_{cr} = \dfrac{\pi^2 EI}{L^2}\) comes from
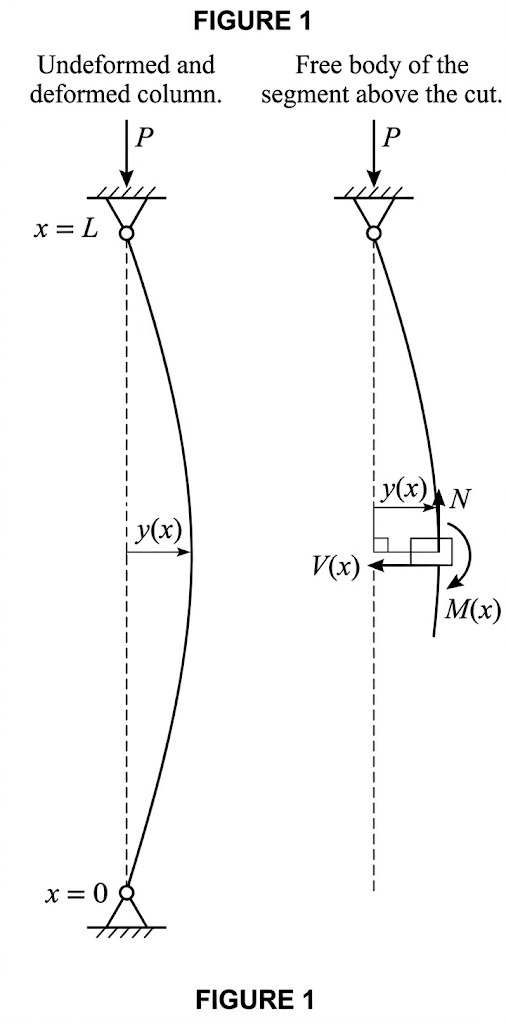
Straight column, centred axial load, pinned at both ends. The goal is the value of \(P\) at which the straight configuration ceases to be the only equilibrium shape and the column can sustain a laterally deflected one — the critical load.
Axis \(x\) along the column, origin at the lower pin, \(x = L\) at the upper pin. Axis \(y\) perpendicular, in the plane of buckling. \(P > 0\) denotes compression.
The column is in equilibrium in the straight configuration under any \(P\) . The question is whether a \(P\) exists for which a slightly deflected configuration \(y(x) \neq 0\) is also an equilibrium.
Cut the column at a generic point \(x\) . Consider the segment from \(x\) to \(L\) . In the deflected configuration the section at \(x\) is displaced laterally by \(y(x)\) with respect to the line of action of \(P\) . That displacement is the lever arm of the moment.
Equilibrium on the deflected geometry (second-order analysis) gives the bending moment at section \(x\) :
Sign: \(P\) acting on a positive lateral displacement \(y\) produces a moment that curves the column back toward \(y = 0\) — negative under the convention \(y'' > 0\) for concavity toward positive \(y\) .
Validity of (1): the moment is written on the deflected geometry, but the lever arm \(y(x)\) does not account for the axial shortening of the column. This is consistent as long as rotations are small, \(y'^2 \ll 1\) .
The Euler-Bernoulli moment–curvature relation, with linearised curvature (\(\kappa \approx y''\) , curvature of the deformed axis, valid for \(y'^2 \ll 1\) ; hypothesis: plane sections remain plane and perpendicular to the deformed axis):
\(E\) is the Young’s modulus (linear elastic material, \(\sigma = E\varepsilon\) ); \(I\) is the second moment of area of the cross-section.
(1) into (2), rearranging:
The cross-section is constant along \(x\) , so \(EI\) in (3) is a constant coefficient.
Define:
with \(k > 0\) (real, since \(P > 0\) and \(EI > 0\) ). Dividing (3) by \(EI\) :
(5) is a linear, homogeneous, second-order ODE with constant coefficients. Characteristic equation \(\lambda^2 + k^2 = 0\) , roots \(\lambda = \pm ik\) . General solution:
\(A\) and \(B\) are constants fixed by the boundary conditions.
Boundary condition at the lower pin — zero displacement:
(7) into (6): \(A \sin(0) + B \cos(0) = B = 0\) . There remains:
Boundary condition at the upper pin — zero displacement:
(9) into (8):
(10) is satisfied if \(A = 0\) or \(\sin(kL) = 0\) .
\(A = 0\) gives \(y(x) = 0\) for all \(x\) : the straight configuration, which is a solution for every \(P\) .
For a deflected configuration (\(A \neq 0\) ):
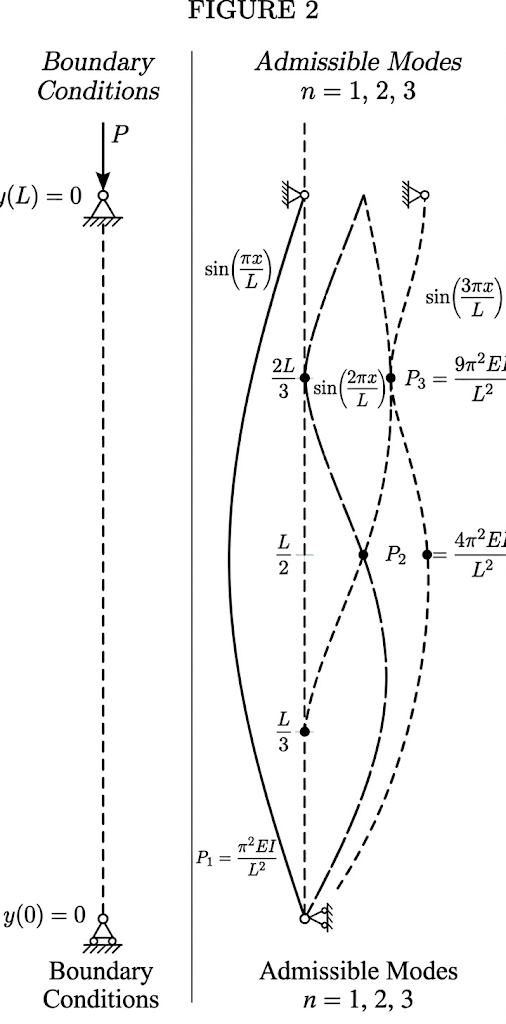
(11) requires \(kL = n\pi\) with \(n = 1, 2, 3, \ldots\) (\(n = 0\) gives \(k = 0\) , i.e. \(P = 0\) ; negative \(n\) adds no independent solutions).
Hence:
(12) into (4), solving for \(P\) :
(13) is an infinite sequence of loads, each associated with a buckling mode of \(n\) half-sine-waves over \([0, L]\) . The corresponding deflected shape follows from (8) and (12):
The amplitude \(A\) remains undetermined: the linearised stability analysis identifies at which load the column buckles, not by how much. (14) defines the shape, not the amplitude.
Validity of (13)–(14): the entire derivation assumes small rotations. As \(A\) grows, the linearisation of curvature breaks down and the exact (elliptic-integral) elastica governs.
The critical load is the lowest in the sequence, \(n = 1\) :
with associated deflected shape:
Validity of (15): the critical stress \(\sigma_{cr} = P_{cr}/A_{s}\) (where \(A_s\) is the cross-sectional area) must remain below the yield stress \(f_y\) . Substituting (15): \(\sigma_{cr} = \pi^2 E / \lambda^2\) , where \(\lambda = L / \sqrt{I/A_s}\) is the slenderness ratio. For stocky columns (\(\lambda\) below the limiting value \(\lambda_{lim} = \pi\sqrt{E/f_y}\) ), material yielding precedes buckling and (15) overestimates the actual failure load. This is the domain where the Euler hyperbola is replaced by empirical or semi-empirical column curves (Johnson parabola, EC3 curves a/b/c/d).
The reason \(n = 1\) governs: in a real column the load increases from zero. \(P_1\) is the first value of \(P\) that admits a deflected equilibrium. Higher modes (\(n \geq 2\) ) require higher loads and are not reached unless intermediate restraints prevent the lower modes.
Assumptions, in the order they entered
| Assumption | Where it entered | Formula |
|---|---|---|
| Equilibrium written on the deflected geometry (second-order analysis) | Lever arm proportional to \(y(x)\) | (1) |
| Small rotations (\(y'^2 \ll 1\) ) | Linearised curvature \(\kappa \approx y''\) ; consistency of the lever arm in (1) | (1), (2) |
| Plane sections remain plane and perpendicular to the deformed axis (Euler-Bernoulli) | Moment–curvature relation | (2) |
| Linear elastic material (\(\sigma = E\varepsilon\) ) | \(E\) constant in the constitutive law | (2) |
| Constant cross-section along \(x\) (\(I = \text{const}\) ) | \(EI\) treated as a constant coefficient | (3) |
| Pinned supports at both ends | \(y(0) = 0\) , \(y(L) = 0\) | (7), (9) |
| Column sufficiently slender (\(\sigma_{cr} < f_y\) ) | Elastic buckling precedes yielding | (15) |
If any of these fails, (15) does not hold. Changed end restraints (fixed-free, fixed-pinned, fixed-fixed) replace \(kL = n\pi\) with a different transcendental equation and alter the numerical coefficient \(\pi^2\) in (15) — conventionally expressed through the effective length \(L_0\) . If \(EI\) varies along \(x\) , (5) has non-constant coefficients and the solution is no longer sinusoidal. If rotations are not small, the exact curvature \(\kappa = y''/(1+y'^2)^{3/2}\) replaces \(y''\) and (5) becomes nonlinear.