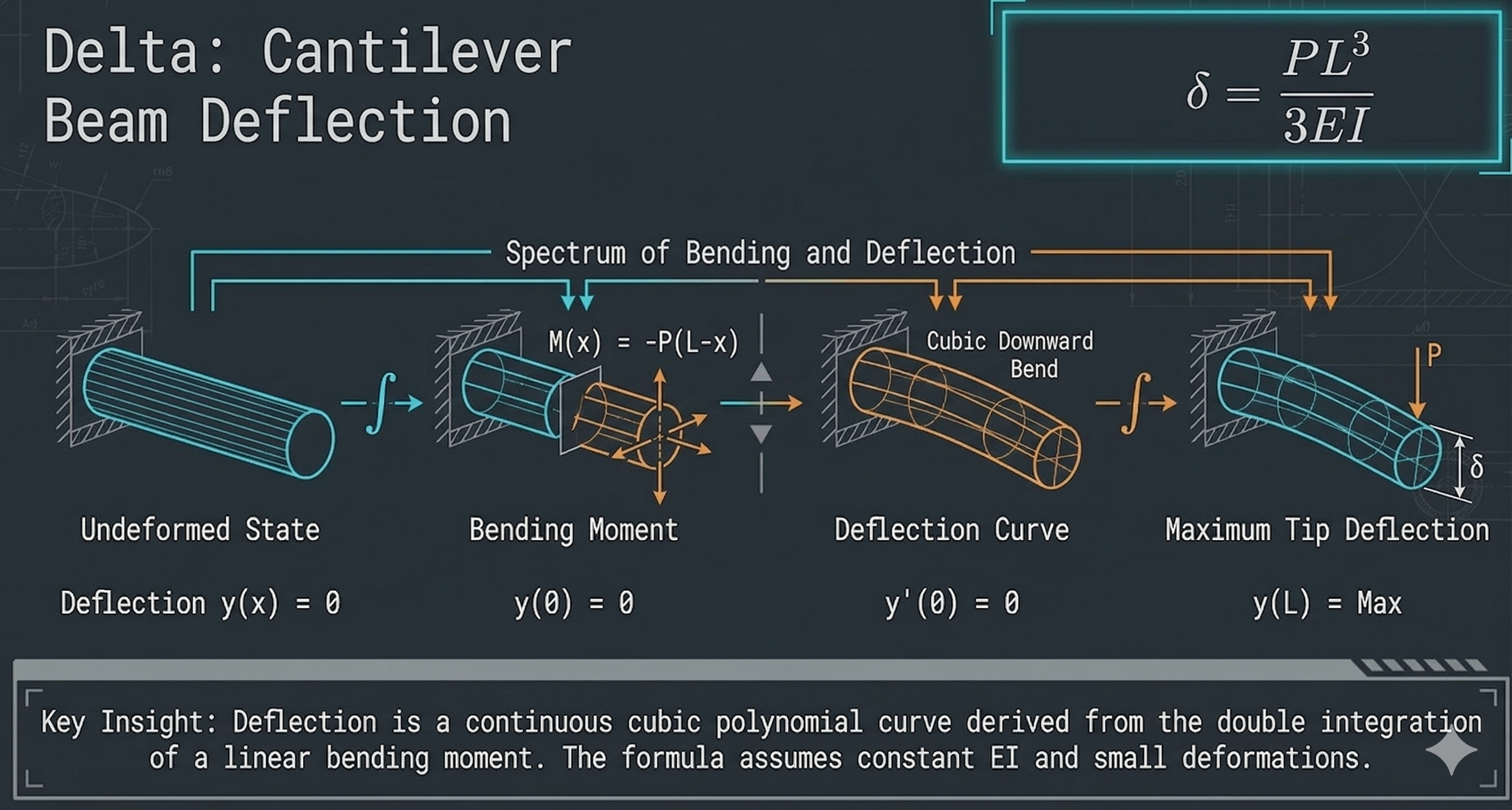
Where \(\delta = \dfrac{PL^3}{3EI}\) comes from
Cantilever beam, concentrated load \(P\) at the free end. The goal is the vertical displacement of the tip, starting from the moment–curvature relation \(EI \cdot y'' = M(x)\) .
Axis \(x\) along the beam, origin at the fixed end, \(x = L\) at the free end. Axis \(y\) vertical, positive upward. \(P > 0\) is the magnitude of the load, directed downward.
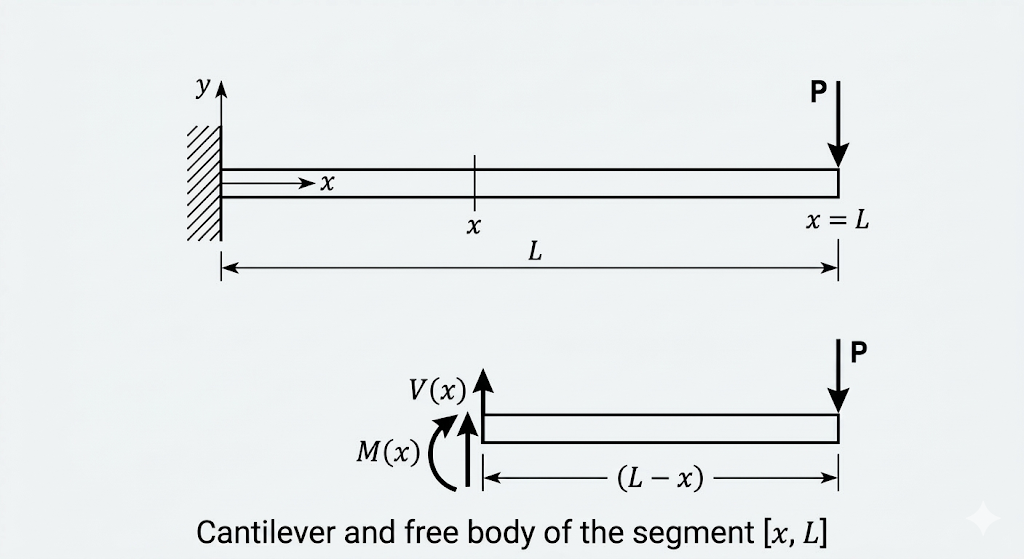
Cut at a generic section \(x\) . Free body of the segment from \(x\) to \(L\) : the only external force is \(P\) downward, applied at distance \((L - x)\) from the section. Moment equilibrium about the cut, \(M(x)\) drawn in the assumed positive sense:
Sign: \(P\) downward with positive lever arm \((L - x)\) produces concavity downward — negative under the convention \(y'' > 0\) for upward concavity.
The moment is written on the undeformed geometry (first-order analysis). Consistent with the small-deformation hypothesis already embedded in \(EI \cdot y'' = M(x)\) .
(1) into \(EI \cdot y'' = M(x)\) :
\(EI\) constant along \(x\) : the cross-section does not change. (2) is a second-order, linear, non-homogeneous ODE with a first-degree polynomial forcing term.
Integrating (2) with respect to \(x\) :
At the fixed end the section does not rotate:
(4) into (3): \(C_1 = 0\) . There remains:
Integrating (5) with respect to \(x\) :
At the fixed end the displacement is zero:
(7) into (6): \(C_2 = 0\) . Full deflection curve:
A cubic polynomial in \(x\) . The third degree comes from a moment that is linear in \(x\) (first degree), integrated twice.
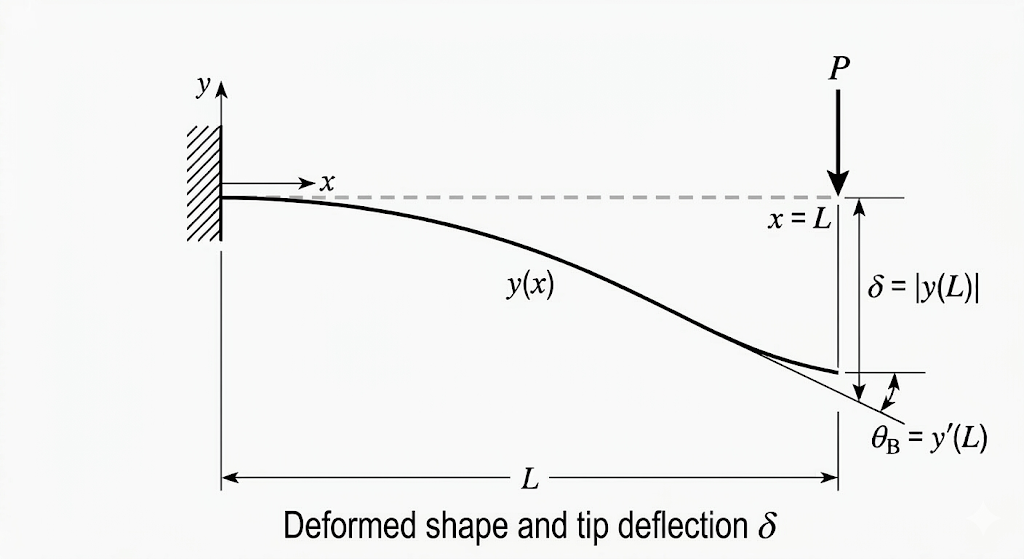
\(x = L\) in (8):
The algebra: \(L \cdot L^2/2 - L^3/6 = L^3(3 - 1)/6 = L^3/3\) . The \(L^3\) factor is \(L\) from the moment arm times \(L^2\) from the double integration. The \(1/3\) factor is the combination \(1/2 - 1/6\) .
The tip deflection is the absolute value of \(y(L)\) :
Assumptions, in the order they entered: plane sections, linear elastic material, small deformations (all three from \(EI \cdot y'' = M(x)\) , the starting point), moment on the undeformed geometry (1), \(EI\) constant along \(x\) (2), perfect fixed end — zero rotation (4) and zero displacement (7). If any one fails, (10) does not hold.