The Peaucellier linkage is an articulated device that holds the product of two distances constant. However its bars move, two of its points — \(P\) and \(Q\) — stay bound by \(\overline{OP}\cdot\overline{OQ} = \text{const}\) . It is an inversor: it mechanically realizes circular inversion. Everything else follows from this single property, including the result it is known for — that it can trace an exact straight line.
The argument runs in two steps. First, the geometry of the articulated rhombus forces the constant product: the inversor property. Then, constraining the input to a circle that passes through \(O\) , the output is a straight line: the line as a special case of the inversion.
1. The inversor cell
The inversor cell is built from six rigid bars:
- two arms \(OA = OB = a\) ;
- four rhombus sides \(PA = PB = QA = QB = b\) .
\(O\) is the fixed pivot, the center of inversion. \(A\) and \(B\) are the rhombus vertices tied to \(O\) ; \(P\) and \(Q\) are the opposite vertices, \(P\) inner and \(Q\) outer. \(P\) is the inversor’s input, \(Q\) its output.
The three points \(O\) , \(P\) , \(Q\) are collinear. \(O\) is equidistant from \(A\) and \(B\) because \(OA = OB\) ; \(P\) and \(Q\) are equidistant from \(A\) and \(B\) because the rhombus sides are equal. All three therefore lie on the perpendicular bisector of \(AB\) , which carries the rhombus diagonal \(PQ\) . Call this line the median axis: \(\overline{OP}\) and \(\overline{OQ}\) are measured along it.
The cell alone leaves \(P\) free in the plane. To drive the inversor, \(P\) is constrained by a crank \(CP\) — the seventh bar — as shown in §3. Counting the frame that anchors the pivots \(O\) and \(C\) , the kinematic members are eight; the physical bars to build are seven.
2. The inversor property — \(\overline{OP}\cdot\overline{OQ}=a^2-b^2\)
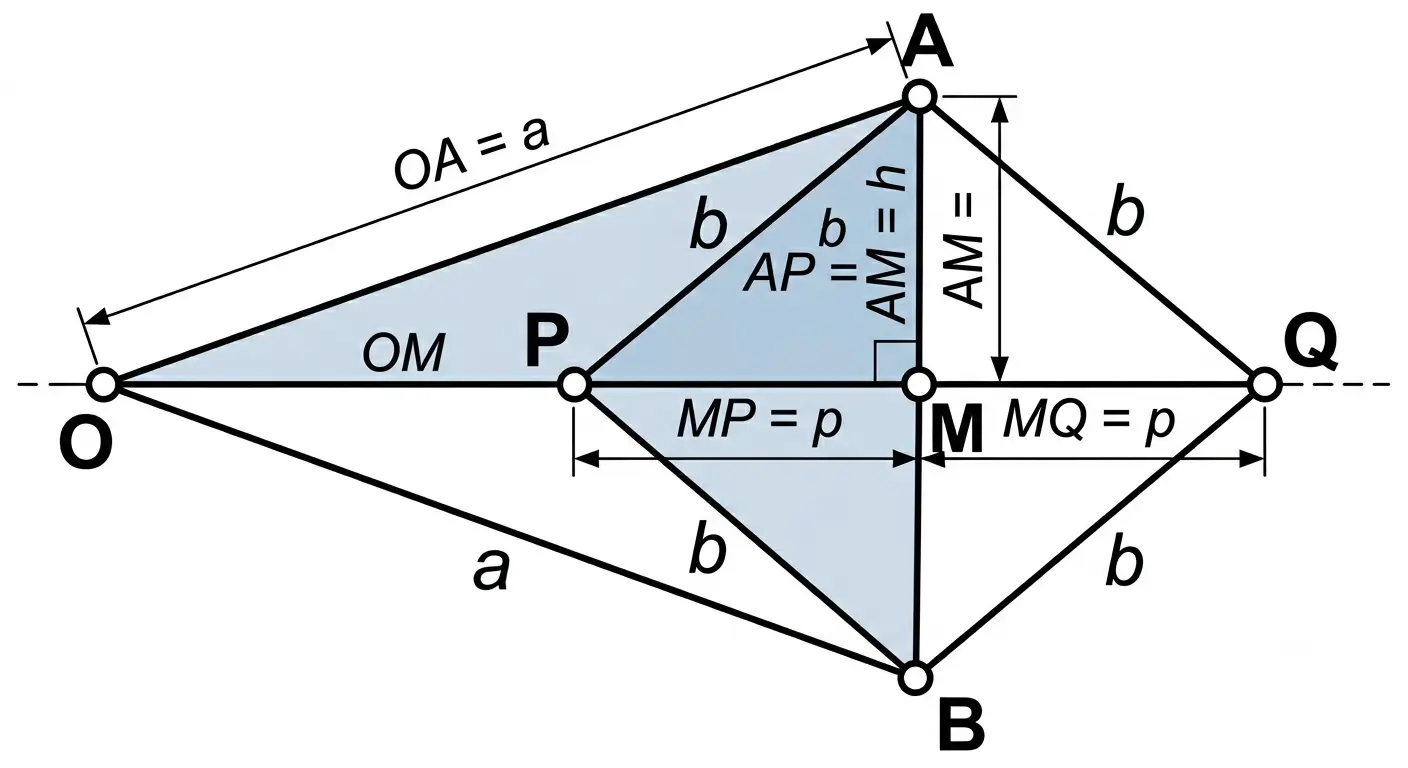
Let \(M\) be the center of the rhombus, where the diagonals \(AB\) and \(PQ\) cross. The diagonals of a rhombus are perpendicular and bisect each other: \(M\) is the midpoint of \(PQ\) and the angle at \(M\) is right. Along the median axis the points lie in the order \(O,\,P,\,M,\,Q\) . Set \(MP = MQ = p\) and \(AM = h\) . Then:
Pythagoras on the two right triangles at \(M\) — \(OMA\) and \(AMP\) — which share the leg \(AM = h\) :
Subtracting \((3)\) from \((2)\) removes \(h^2\) :
The right side of \((4)\) is the difference of squares \((\overline{OM}-p)(\overline{OM}+p)\) , which by \((1)\) is the product \(\overline{OP}\cdot\overline{OQ}\) . Hence:
Valid for \(a > b\) ; otherwise \(a^2-b^2 \le 0\) and the cell is not an inversor.
The lengths \(a\) and \(b\) belong to rigid bars: they do not change in any configuration. The product \(\overline{OP}\cdot\overline{OQ}\) is therefore constant in every position of the mechanism.
This is the inversor property. Two points on the same ray from \(O\) , with a constant product of distances, are inverse points with respect to a circle centered at \(O\) : relation \((5)\) is circular inversion with constant \(a^2-b^2\) . Given the input \(P\) , the mechanism builds its output \(Q\) as the inverse. Everything that follows is a consequence of \((5)\) .
3. The straight line as a special case — the inverse of a circle through \(O\)
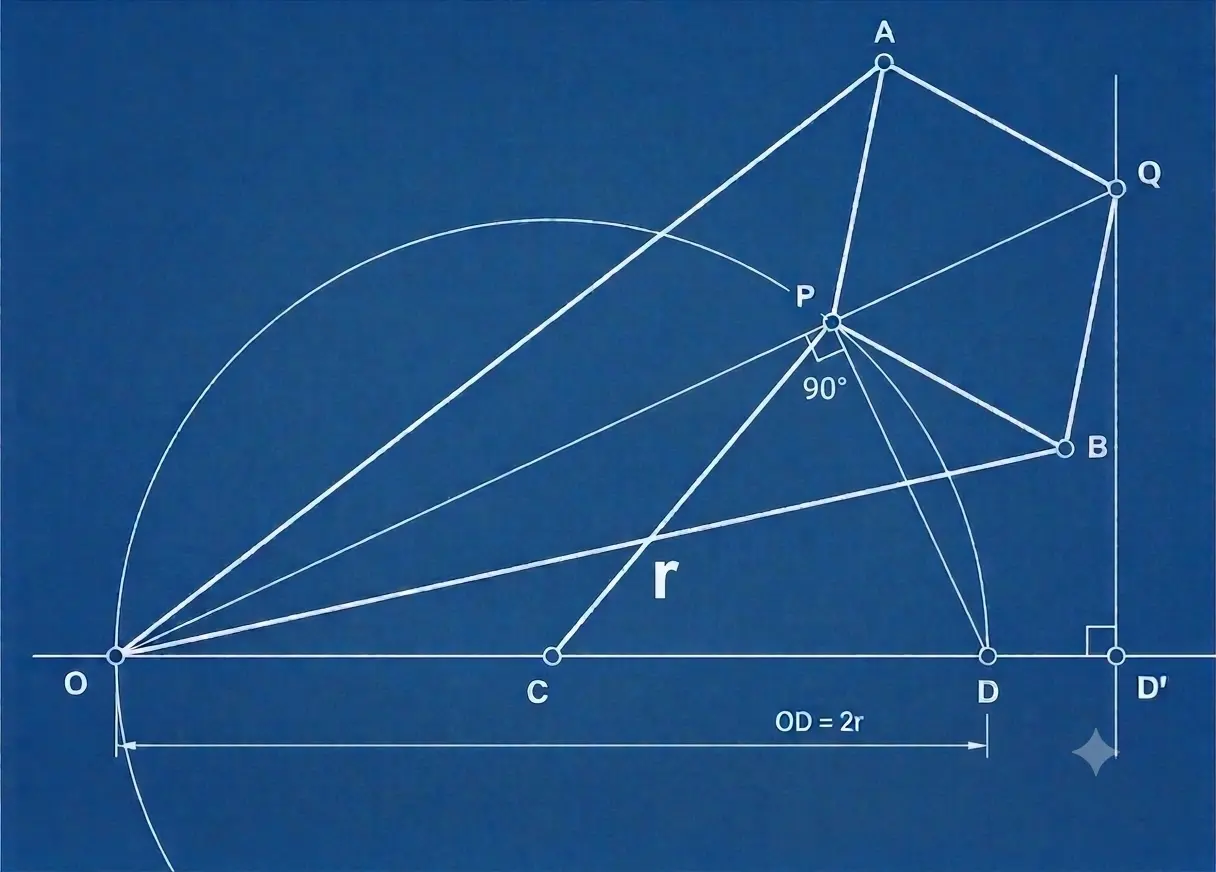
Now a specific input is imposed. The crank \(CP\) , hinged at a second fixed pivot \(C\) on the axis, turns \(P\) on a circle of radius \(r = \overline{OC}\) — the motor circle. Since \(\overline{OC}=r\) , the circle passes through \(O\) .
Geometric route
Let \(D\) be the far end of the diameter from \(O\) , on the axis:
\(OD\) is a diameter and \(P\) lies on the circle, so by Thales’ theorem:
Let \(D'\) be the inverse of \(D\) : the point on the axis with \(\overline{OD}\cdot\overline{OD'} = a^2-b^2\) . It is fixed, since \(D\) and \(a^2-b^2\) are. By \((5)\) and the definition of \(D'\) , the two products coincide:
Triangles \(OPD\) and \(OD'Q\) share the angle at \(O\) and, by \((8)\) , the sides enclosing it are proportional: they are similar by the side-angle-side criterion. The right angle at \(P\) — relation \((7)\) — transfers to its counterpart at \(D'\) :
So \(Q\) lies on the line through \(D'\) perpendicular to the axis \(OD\) . Since \(D'\) is fixed, this line does not depend on the position of \(P\) : it is the same for every point of the motor circle.
Trigonometric check
The same result analytically. With \(O\) at the origin and the axis \(OD\) as the \(x\) -axis, a point \(P\) on the motor circle (center \(C=(r,0)\) , radius \(r\) ) has the polar equation:
where \(\theta\) is the polar angle of \(P\) . By \((5)\) , the output \(Q\) is at distance:
The \(x\) -coordinate of \(Q\) is \(\rho_Q\cos\theta\) :
independent of \(\theta\) . The two routes agree: the locus of \(Q\) is the vertical line
This is the equation of a vertical line — the one case that cannot be written as \(y=f(x)\) , since a vertical has every \(y\) over a single \(x\) . The fixed value is only the \(x\) -coordinate of \(Q\) ; the \(y\) -coordinate, \(y_Q = \rho_Q\sin\theta = \tfrac{a^2-b^2}{2r}\tan\theta\) , sweeps the line as \(\theta\) runs over \((-90^\circ, +90^\circ)\) .
The geometric route shows why (Thales plus inversion send the circle to a line); the trigonometric check confirms it by computation. Equation \((10)\) — the chord \(\rho_P = 2r\cos\theta\) — is itself Thales: \(\overline{OP}\) is the leg of the right triangle inscribed in the diameter \(2r\) .
As the crank turns \(P\) on the motor circle, \(Q\) runs along this fixed line: the inversor turns the rotational motion of its input into the rectilinear motion of its output.
Result
Assumptions, in the order they entered:
- Rigid bars, ideal hinges — §1
- Equal arms \(OA = OB = a\) — §1
- Rhombus of equal sides \(PA = PB = QA = QB = b\) — §1
- \(a > b\) (so that \(a^2-b^2 > 0\) ) — §2
- Crank \(CP = r\) with \(\overline{OC} = r\) , forcing \(P\) onto the motor circle through \(O\) (\(\overline{OD}=2r\) ) — §3
Limits of validity
- Exact line, finite stroke. The locus of \(Q\) is a line, but \(Q\) travels only a segment of it: the stroke is bounded by the bar geometry.
- Singular configurations. Positions where the rhombus collapses (bars collinear) or the mechanism changes assembly mode are excluded; there the inversion relation loses physical meaning.
- \(a > b\) required, from \((5)\) .
- Pure kinematics, zero speed. The property is geometric, true even at rest. Dynamics, friction, and elasticity are outside this document.
The linkage is due to Charles-Nicolas Peaucellier (1864) and, independently, to Lippman Lipkin (1871): the first exact straight-line linkage built from hinges alone.